Scheduling Optimization Design of IoT Embedded System Based on Improved RMS Algorithm
Real-time task scheduling optimization for IoT embedded systems using an improved RMS algorithm
Overview
This project studies real-time task scheduling optimization for IoT embedded systems. It was conducted during my research assistant experience at the IoT Engineering Laboratory, Shandong University of Science and Technology, and resulted in an IEEE conference paper.
The goal is to improve scheduling efficiency and reliability under dynamic workloads. Traditional Rate Monotonic Scheduling (RMS) assigns fixed priorities mainly according to task periods. This is simple and analyzable, but it may become less adaptive when task urgency changes at runtime.
The proposed improved RMS algorithm introduces a dynamic priority adjustment mechanism that considers both execution characteristics and deadline urgency. The resulting scheduler aims to reduce task completion time, lower deadline violation rate, and improve resource utilization in simulated IoT embedded scenarios.
Project Thumbnail
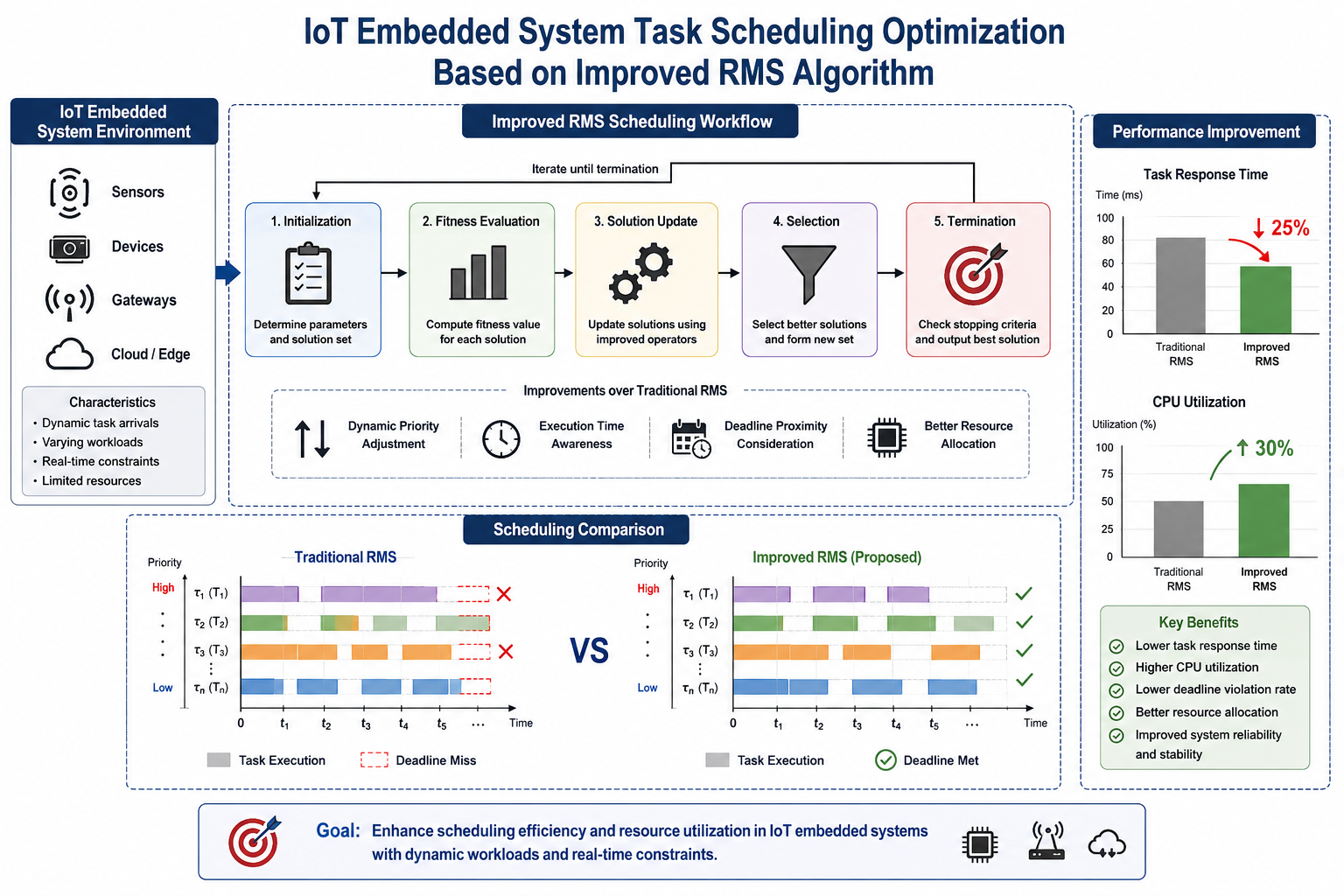
The figure summarizes the main idea of the project: an IoT embedded system receives dynamic tasks from sensors, devices, gateways, and edge/cloud components; the improved RMS scheduler evaluates task urgency and resource conditions; and the final schedule reduces response time, deadline misses, and resource waste.
Motivation
IoT embedded systems often run multiple periodic or semi-periodic tasks under limited CPU, memory, and energy resources. Examples include sensor acquisition, local preprocessing, wireless communication, actuator control, and safety monitoring.
In these systems, missing a deadline may reduce service quality or even cause unsafe behavior. At the same time, embedded devices cannot simply over-provision computation. Scheduling therefore becomes a key mechanism for maintaining reliability under resource constraints.
This project asks:
- How can RMS be improved when task urgency changes dynamically?
- How can a scheduler reduce deadline misses without introducing excessive complexity?
- How can we evaluate scheduling quality through latency, deadline satisfaction, and resource utilization?
The project is an early example of my interest in efficient intelligent systems under constrained resources.
Problem Setting
IoT embedded systems often operate under limited computation resources and strict timing constraints. In practical scenarios such as smart manufacturing, healthcare monitoring, energy management, and traffic control, tasks may arrive dynamically and have different execution times, periods, and deadlines.
Traditional RMS assigns priorities according to task periods: tasks with shorter periods receive higher priority. For a task set (\tau_i=(C_i,T_i,D_i)), where (C_i) is execution time, (T_i) is period, and (D_i) is deadline, RMS mainly uses (T_i) to determine priority.
However, in dynamic IoT settings, two tasks with similar periods may have very different deadline pressure at a particular moment. A fixed-priority rule can therefore be suboptimal. This project improves RMS by adding deadline-aware priority adjustment.
Method
The improved RMS scheduler considers two main factors:
- period/execution awareness: preserve the simplicity of RMS and account for task execution requirements;
- deadline urgency: boost tasks that are closer to their deadlines;
- resource utilization: prefer schedules that reduce idle time and improve CPU usage.
A simplified priority score can be interpreted as:
[ P_i = \alpha \cdot P_i^{\mathrm{RMS}} + \beta \cdot U_i^{\mathrm{deadline}} ]
where:
- (P_i^{\mathrm{RMS}}) is the base RMS priority;
- (U_i^{\mathrm{deadline}}) measures urgency as the deadline approaches;
- (\alpha) and (\beta) balance fixed scheduling structure and dynamic adaptation.
The exact implementation uses a simulation-based optimization workflow to evaluate candidate schedules.
The scheduling process follows a simulation-based optimization workflow:
- Initialize task parameters and candidate scheduling solutions.
- Evaluate each candidate solution with a fitness function.
- Update candidate schedules using improved operators.
- Select better schedules based on performance metrics.
- Output the best scheduling solution after termination criteria are met.
Task Model
The simulated IoT embedded system is modeled with representative sensing, computing, and control tasks.
| Task | Description | Execution Time | Period | Deadline |
|---|---|---|---|---|
| Task 1 | Sensor data collection | 6 | 20 | 20 |
| Task 2 | Data processing and analysis | 12 | 40 | 40 |
| Task 3 | Actuator control | 4 | 15 | 15 |
These tasks represent a typical embedded IoT pipeline involving data acquisition, computation, and control.
Evaluation Metrics
The scheduler is evaluated using three metrics:
- Average completion time: lower values indicate faster task turnaround.
- Deadline violation rate: lower values indicate better real-time reliability.
- Resource utilization: higher values indicate more effective use of constrained compute resources.
These metrics capture both responsiveness and reliability, which are essential for embedded IoT systems.
Experimental Results
The improved RMS algorithm was compared with traditional RMS under multiple simulated workload conditions. The evaluation uses three metrics: average task completion time, deadline violation rate, and system resource utilization.
| Scenario | Algorithm | Avg. Completion Time ↓ | Deadline Violation ↓ | Resource Utilization ↑ |
|---|---|---|---|---|
| 1 | Improved RMS | 45 ms | 2% | 75% |
| 1 | Traditional RMS | 52 ms | 5% | 70% |
| 2 | Improved RMS | 68 ms | 4% | 63% |
| 2 | Traditional RMS | 76 ms | 8% | 58% |
| 3 | Improved RMS | 92 ms | 6% | 57% |
| 3 | Traditional RMS | 105 ms | 12% | 52% |
| 4 | Improved RMS | 78 ms | 5% | 65% |
| 4 | Traditional RMS | 88 ms | 9% | 60% |
| 5 | Improved RMS | 85 ms | 7% | 60% |
| 5 | Traditional RMS | 98 ms | 11% | 55% |
Across all tested scenarios, the improved RMS algorithm achieves lower completion time, fewer deadline violations, and higher resource utilization than traditional RMS.
Analysis
The experimental results show that the improved RMS scheduler consistently outperforms the traditional RMS baseline across the tested scenarios.
The main reason is that deadline-aware adjustment gives urgent tasks a chance to execute earlier when fixed RMS priority would otherwise delay them. This reduces deadline violations while maintaining the low complexity and interpretability of RMS.
Key observations:
- dynamic priority adjustment reduces task response time;
- deadline-aware scheduling improves real-time reliability;
- adaptive priority assignment improves resource utilization;
- simple scheduling heuristics can be effective when designed around system constraints.
Research Skills Gained
This early research project helped me develop experience in:
- real-time scheduling and embedded systems;
- algorithm design under resource constraints;
- simulation-based performance evaluation;
- quantitative comparison using latency, deadline satisfaction, and utilization metrics;
- writing and publishing an IEEE conference paper.
Although this project is earlier than my current research direction in 3D perception and autonomous driving, it shaped my interest in efficient intelligent systems, especially systems that must make reliable decisions under limited resources.
In retrospect, the project also connects naturally to my current work: communication-efficient collaborative perception and token-based occupancy prediction are also about allocating limited resources to the most useful information.
Publication
Junfeng Ren, Scheduling Optimization Design of IoT Embedded System Based on Improved RMS Algorithm, 2023 International Conference on Ambient Intelligence, Knowledge Informatics and Industrial Electronics (AIKIIE), IEEE, 2023.